Жёлтый снеговик танцует в ритме нашей жизни
Хорошему танцору по большому счету ничего не мешает. Кроме того отсутствие ног и рук.
Кроме того нечеловеческая сущность. Основное — ощущать ритм, бит! Данный жёлтенький — может. Зная не так уж большое количество перемещений, владея скромными возможностями, коротышка танцует самозабвенно, проникновенно и реализуется на все 100%.
Способен поднять настроение!
Дабы оно улучшилось и встало, посмотрите видео на данной странице. В том месте два ролика: пляска под «живой» барабан и под песню группы Spoon. Ещё поглядите эту прелестную запись (MPEG; 2,5 мегабайта). Ну как? Смахивает данный дорогой робот на цыплёнка?
Похож так как!
Но один из его создателей, японец Хидеки Кодзима (Hideki Kozima) из Национального университета разработки коммуникаций (NICT), пишет о сходстве со снеговиком. Имеется в виду, э, жёлтый снег?
")
Робот нашёл присутствие игрушечной собаки и приглашает её на танец.
Собака не принимает предложение (кадр с сайта cmu.edu).
Но, второй разработчик, американец Марек Мичаловски (Marek P. Michalowski) из университета Карнеги-Меллона (Carnegie Mellon University), со снеговиком параллелей не проводит. Согласно его точке зрения, это «creature-like robot», другими словами робот, подобный живому существу.
Не имеет значения, какому.
Именуется жёлтый танцор Keepon. И с толкованием имени у создателей также имеется расхождения.
В случае если Козима предлагает произносить его как «key-pong» (по-английски получается «ключ-вонь»), то для Мичаловски тут скорее угадывается слившееся «Keep on» — «продолжай»: «Keep on dancing» — вы, возможно, слышали данный примитивный голосовой сэмпл.
Всё-таки наличие чёрного цилиндра и кожи — великая вещь (фото с сайта cmu.edu).
Так вот, Keepon — несложный робот. Его покрытое силоксановым каучуком мягкое тело складывается из двух частей, назовём их животом и головой.
В каждом глазу танцора расположено по цветной цифровой камере с широкоугольным объективом (угол обзора 120 градусов по горизонтали).
В носу находится микрофон. В животе скрыты тросики с функцией «кукол дёргают за нитки» и шарниры, а всё другое — моторчики, платы и другое — скрывается в тёмном цилиндре, играющем для Keepon роль танцпола.
Демонстрация всех четырёх степеней свободы Keepon (изображение с сайта cmu.edu).
Так, марионетка имеет четыре степени свободы: кивает головой (вперёд-вниз; вверх-назад) на плюс-минус 40 градусов, поворачивает голову вправо-влево в пределах 180 градусов, качается из стороны в сторону (плюс-минус 25 градусов) и подпрыгивает/приседает на 15 мм. Но в комбинациях данный примитив вправду возможно назвать танцем.
И рассмотреть в нём кое-какие эмоции.
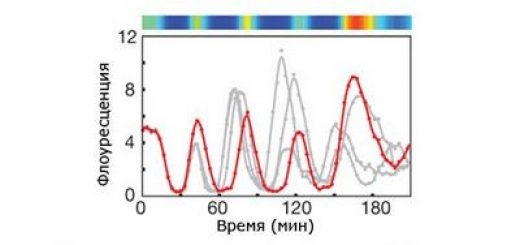
«Робот может танцевать, ориентируясь на звук либо видео», — хвастается Мичаловски. Как же Keepon это делает?
Девочка, которая дала согласие танцевать с роботом, просила не именовать её имени (фото с сайта cmu.edu).
«Виной» тому ПО Max/MSP — графическая среда для мультимедиа, созданная американской компанией Cycling ?74. Это ПО обрабатывает звуки и синхронизирует с ними, к примеру, скринсейверы.
Создатели Keepon мало переписали программу, дабы она преобразовывала ритм в сигналы для определённых перемещений. А дабы избежать однообразия, заложили методы, изменяющие «танцевальные па» более-менее непредсказуемо.
Фактически вся работа по созданию самого робота Keepon легла на плечи Кодзимы. А Мичаловски (на снимке справа) по большей части трудился с ПО (фото с сайтов nict.go.jp и roboceptionist.com).
Кроме этого Мичаловски и Кодзима воспользовались ПО, которое распознаёт по примерам изображения с камер-глаз робота и даёт Keepon соответствующие команды. Если вы наблюдали видеоролики, то увидели, что жёлтый танцор реагирует на появление человека либо игрушки, наблюдает глаза в глаза, предлагает размяться.
направляться подчернуть, что у «цыплёнка-снеговика» достаточно важная цель — он прокладывает путь вторым автомобилям, каковые будут «социально взаимодействовать» с людьми на как следует новом уровне. Об этом авторы проекта пишут на 96 страницах собственной в полной мере научной статьи (PDF-документ, 2 мегабайта).
До тех пор пока задача Keepon содержится в «обмене вниманием и эмоциями» с детьми, как пишет Кодзима, «самым несложным и самым всесторонним методом». В Японии уже был совершён опыт с участием 200 детишек в возрасте от 2 лет.
Большая часть мальчиков и девочек танцевать вместе с роботом отчего-то не захотели. Мичаловски считает, что ребятня и застеснялась.
Быть может, будь у Keepon ноги и руки, дети среагировали бы в противном случае.
Прототип нового робота Roillo (фото с сайта cmu.edu).
Но опыт был небесполезен. Исследователи увидели, что малышня с большей долей возможности пускается в пляс, в случае если робот ритмично двигается под музыку, попадает в такт, а не просто непоследовательно выделывается.
Сейчас планируется выяснить, может ли робот «поймать» другие, более сложные ритмы, типа людской речи. И этим, вероятнее, займётся дополнительный робот по имени Roillo, светло синий, с крутящейся антенной на голове.
Танцевать он, "Наверное," не будет.