Что такое робот
")
Сейчас не выработано единой концепции относительно того, из чего же состоит робот. Кроме того в отношении недавно показавшегося понятия «промышленный робот» нет интернационального соглашения о его определениях — границы термина устанавливаются очень произвольно.
К примеру, в Японии роботом именуется устройство, действующее по принципу забрать-положить, т. е. несложная механическая рука, перемещения которой ограничены механическими упорами. Но на Западе подобное устройство, не владеющее гибкостью (в случае если кто-нибудь не передвинет упоры), считается особенным видом твёрдого автомата, а не роботом.
Итак, в то время, когда же мы имеем дело с робототехнической совокупностью, а в то время, когда легко с классической формой автоматики?
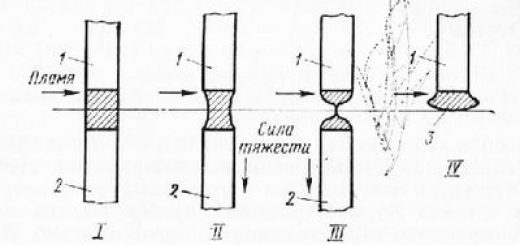
К примеру, поставлена задача: отрезать кусок от громадного железного страницы. Разглядим как саму операцию резания, так и манипулирование с страницей.
Варианты ответа данной задачи в соответствии с уровнем сложности применяемых технических средств возможно представить в таковой последовательности.
1. Человек вручную сгибает лист вперед-назад, пока не отломится кусок железного страницы.
2. Лист разрезается посредством ручного инструмента.
3 Лист разрезается посредством инструмента с каким-либо силовым приводом.
4. Лист разрезается на особом оборудовании под управлением человека.
5. Режущий станок машинально делает заданную последовательность резки, которую нельзя изменить; загрузку страницы осуществляет человек или поточная линия.
6. Устройство типа «забрать-положить» берет лист из единственного фиксированного положения и загружает в станок, что после этого отрезает лист в заданной последовательности. Положение страницы для захвата и последовательность операций резки смогут быть поменяны методом механической переналадки станка.
7. Несложный робот с позиционной совокупностью управления забирает лист из произвольного положения и загружает его в станок, что вырезает один из нескольких конфигураций и возможных профилей (вероятных в зависимости от того, откуда робот берет лист).
8. Робот с контурным управлением по целой траектории мягко берет один из многих страниц и с управляемым ускорением загружает его в станок, что вырезает один из многих сложных профилей.
9. Вся робототехническая совокупность есть частью намного большей совокупности, управляемой компьютером. Виды профилей смогут изменяться в зависимости от номенклатуры создаваемых изделий.
10. Вся робототехническая совокупность применяет большой количество визуальной и тактильной информации, к примеру, для поиска страницы.
Уровни с первого по шестой считаются (на Западе) твёрдой (либо специальной) автоматизацией, не смотря на то, что ясно, что на шестом уровне уже достигается большая гибкость. Седьмой уровень представляет собой несложную робототехническую совокупность, потому, что возможность трансформации запрограммированных перемещений манипулятора разрешает классифицировать его как робот.
Потом, металлорежущий станок возможно снабжен устройством числового программного управления (ЧПУ). Таковой непроизвольный станок управляется ми-пи- либо микрокомпьютером с применением предварительно записанной последовательности операций механической обработки подробностей.
Но, не смотря на то, что его и возможно перепрограммировать, станок с ЧПУ нельзя отнести к роботам, потому, что он может, к примеру, лишь резать металл. Устройства уровней 9 и 10 уже применяются на фабриках, но их широкое распространение сдерживается необходимостью ответа последовательности неприятностей.
на данный момент приняты разные определения роботов. В большинстве случаев, роботами именуют механизмы, каковые полностью либо частично имитируют человека — наружность, действия, время от времени то и второе. Что же касается определений промышленного робота, то они различаются по степени общности.
К примеру, Японская ассоциация промышленных роботов подразделяет роботы по уровню сложности на шесть классов: ручные манипуляторы; устройства типа «забрать-положить»; программируемые манипуляторы; роботы, обучаемые вручную; роботы, управляемые на языке программирования; роботы, талантливые реагировать на внешнюю среду.
На западе термин «промышленный робот» не включает первые два класса японской трактовки. Английская ассоциация по робототехнике (БАР) определяет робот как «перепрограммируемое устройство, предназначенное для транспортировки и манипулирования подробностей, инструментов либо специальной технологической оснастки при помощи вариабельных программируемых перемещений по исполнению конкретных производственных задач».
Определение, применяемое Американским университетом по робототехнике, по большей части схоже с трактовкой БАР и характеризует робот как «перепрограммируемый многофункциональный манипулятор, предназначенный для движения материалов, подробностей, инструментов или других особых устройств при помощи программируемых перемещений для исполнения разнообразных задач».
Так, термином «робот», как он трактуется на Западе (и в данной книге), не охватываются такие устройства, как дистанционно управляемые манипуляторы (телеоператоры), неестественные конечности, основанные на правилах бионики, либо протезы, потому, что эти устройства управляются человеком, не смотря на то, что они и основаны на той же технологии, что и роботы. Отнесение японцами к роботам устройств типа «забрать-положить» и ручных манипуляторов без шуток затрудняет использование статистики роботов и сравнение производства в Японии, Западной Европе и США.
Но чтобы преодолеть эту путаницу, японцы внесли предложение термин мехатроника, делающий упор на связи электроники и механики как основной особенности всех видов данной техники.