Образование поверхностей при воспроизведении образующей линии в виде следа материальной точки
Образующая линия в виде следа материальной точки возможно воспроизведена при работе разным режущим инструментом.
")
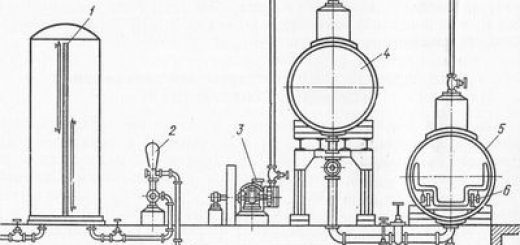
Рис. 1. Воспроизведение образующей линии как следа перемещения материальной точки.
В качестве материальной точки возможно разглядывать вершину резца, точки А зенкера и сверла, вершину А пальцевой фрезы, точку Л шлифовального круга.
В случаях, представленных на рис. 1, а, б, д и з, вероятно воспроизведение образующей линии как в виде прямой, так и в виде кривой заданной формы.
Подобный принцип воспроизведения образующей линии употребляется при применении резцов, продемонстрированных на рис. 1, г и шлифовальных кругов, но в этих обстоятельствах вероятно воспроизведение лишь прямолинейной образующей.
При работе торцовой фрезой образующая линия кроме этого воспроизводится вершиной режущего инструмента — зуба фрезы, наряду с этим она имеет форму дуги окружности, расположенной в плоскости обрабатываемой поверхности. Подобная картина имеет место и при работе чашечными кругами.
Оба последних способа пригодны для обработки плоскостей.
В случаях, изображенных на рис. 1, а, б, г, д, ж и з, для воспроизведения образующей линии нужно обеспечить перемещение материальной точки, а соответственно и режущего инструмента, довольно обрабатываемой подробности по заданной траектории.
Для воспроизведения мнимой режущей кромки как следа перемещения материальной точки смогут быть использованы разные способы профилирования: геометрическое профилирование, кинематическое профилирование, профилирование по копиру, профилирование с применением вычислительных устройств в совокупности управления.
Геометрическое профилирование. Как указывалось выше, геометрическое профилирование осуществляется методом перемещения рабочих органов по направляющим поверхностям, имеющим соответствующую геометрическую форму.
Разглядим способы геометрического профилирования применительно к самый распространенным формам образующих линий.
При воспроизведении прямолинейной образующей рабочий орган перемещается по прямолинейным направляющим, установленным параллельно образующей линии. В случае если углы наклона образующей смогут иметь разные значения, то направляющие выполняются поворотными.
При воспроизведении образующей в форме дуги окружности рабочий орган приобретает перемещение по дуге окружности, или перемещаясь по дуговым направляющим, или поворачиваясь вместе с осью вращения, расположенной в подшипниках.
В зависимости от положения оси вращения, при обработке получаются или сферические, или тороидные поверхности.
Профилирование по копиру. При профилировании по копиру два рабочих органа перемещаются в двух взаимно перпендикулярных направлениях либо под углом один к второму.
Рабочий орган приобретает от механизмов привода подачу в продольном направлении, которая именуется задающей подачей. Рабочий орган приобретает перемещение от копира.
Это перемещение именуется следящей подачей.
На рис. 2 продемонстрированы пазовые копиры, снабжающие кинематическое замыкание цепи привода рабочего органа.
Но копиры смогут быть выполнены открытыми, как это было продемонстрировано выше. В этом случае необходимо применить силовое замыкание посредством груза либо пружины.
При прямолинейной образующей копир кроме этого имеет прямолинейную форму. Для трансформации угла наклона образующей копир возможно выполнен поворотным.
При воспроизведении дуговых либо криволинейных образующих копиру придается соответствующая форма.
В этом случае кроме этого возможно использовано как яркое копирование, так и копирование со следящей совокупностью.
Кинематическое профилирование. Способ кинематического профилирования используется при воспроизведении наклонной прямолинейной и криволинейных образующей , заданных уравнением.
Рис. 2. Способы профилирования при воспроизведении образующей как следа перемещения материальной точки.
При профилировании наклонной прямолинейной образующей ходовой винт , информирующий перемещение рабочему органу, связывается через коническую передачу и сменные шестерни с ходовым винтом, информирующим перемещение рабочему органу.
Для воспроизведения наклонной образующей с углом наклона у обязана существовать определенная зависимость между перемещениями рабочих
При воспроизведении криволинейных образующих употребляются более сложные кинематические связи, рассмотренные ниже в разделе, посвященном профилирующим кинематическим цепям.
Профилирование с применением вычислительных устройств в совокупности управления. В этом случае употребляется рассмотренный выше принцип применения вычислительных устройств для управления перемещениями двух рабочих органов при наличии функциональной связи между этими перемещениями.
Указанный принцип профилирования возможно применен для воспроизведения образующих разной формы: прямолинейных, в форме дуги окружности, криволинейных.
Форма образующей определяется характером программы, которая вводится в вычислительное устройство В, которое руководит приводами X и У, осуществляющими перемещение рабочих органов.
Комбинированные способы профилирования. Во многих случаях для воспроизведения образующей заданной формы выясняется целесообразным применять комбинированные способы профилирования.
К примеру, для профилирования наклонной прямолинейной образующей используется сочетание геометрического и кинематического профилирования либо сочетание кинематическрго профилирования и профилирования по копиру. Использование комбинированных способов профилирования обусловлено тем, что по конструктивным соображениям оказывается неосуществимым взять громадные углы наклона за счет поворота направляющих либо копира, а кинематическое профилирование требует применения большего комплекта сменных шестерен для получения любых значений углов.
При комбинированном профилировании возможно ограничиться маленьким комплектом сменных шестерен, что дает возможность приобрести последовательность значений углов наклона с определенными промежутками, а в промежутков нужные значения углов настраиваются установкой направляющих либо копира.
При сочетании кинематического и геометрического профилирования рабочий орган перемещается по направляющим, установленным под углом Yi- Ходовой винт, информирующий перемещение рабочему органу, как в большинстве случаев, связан через постоянную передачу и сменные шестерни с винтом, информирующим перемещение рабочему органу.
Рис. 3. Комбинированные способы профилирования.
При сочетании профилирования и кинематического профилирования по копиру винт, информирующий перемещение рабочему органу, вращается в подшипнике колодки. Вместе с колодкой винт может перемещаться на протяжении собственной оси. Колодка связана цапфой с ползуном, перемещающимся по копиру.
Так, при перемещении рабочего органа рабочий орган перемещается благодаря не только вращению винта, но и перемещению его в осевом направлении благодаря скольжения колодки по копиру.
Из последнего выражения находим угол Yi установки копира.
Рассмотренные способы воспроизведения образующей линии активно применяются при обработке резцом и шлифовальным кругом поверхностей вращения как подробностей типа тел вращения, так и корпусных подробностей, плоскостей, многогранных поверхностей, контурно-сложных линейчатых поверхностей. При обработке поверхностей вращения профилирующее перемещение по направляющей линии сходится с главным вращательным перемещением, при обработке плоскостей, многогранных и линейчатых поверхностей профилирующее перемещение сходится с главным прямолинейным перемещением.
Образование пространственно-сложных поверхностей. Как было по-продемонстрировано выше, пространственно-сложная поверхность задается рядом кривых линий, расположенных в нескольких параллельных сечениях.
В каждом из этих сечений возможно вопроизведена контурно-сложная поверхность. В случае если сечения, в которых воспроизводятся контурно-сложные поверхности, будут расположены достаточно близко, то они образуют заданную пространственно-сложную поверхность.
Так, задача воспроизведения пространственно-сложных поверхностей сводится к воспроизведению последовательности контурно-сложных поверхностей, расположенных в родных друг к другу сечениях.
Рис. 4. Образование пространственно-сложных поверхностей.
Для воспроизведения пространственно-сложных поверхностей в основном используются способы профилирования по копиру и способы профилирования с применением вычислительных устройств в совокупности управления.
Для воспроизведения контурно-сложных поверхностей в отдельных сечениях пространственно-сложной поверхности в большинстве случаев используется инструмент, при работе которого образующая линия получается как след перемещения материальной точки. Принцип воспроизведения пространственно-сложной поверхности при профилировании по копиру возможно рассмотрен на базе схемы, представленной на рис. 4.
Обработка подробности осуществляется пальцевой фрезой, по объемному копиру, что воздействует на щуп копировального прибора. Обрабатываемая копир и деталь закрепляются на стойке, установленной на столе. В ходе обработки контурно-сложной поверхности в очередном сечении бабка вместе с салазками приобретает перемещение
по направляющим колонны и поперечное перемещение на протяжении оси фрезерного шпинделя по направляющим салазок. Салазки приобретают перемещение от регулируемого привода, информирующего вращение винту, а шпиндельная бабка — от регулируемого привода, информирующего вращение винту.
Регулируемые приводы приобретают сигналы управления от копировального прибора по связям. По окончании обработки контурно-сложной поверхности в одном из сечений, вызываемом строчкой, стол смещается на величину промежутка между смежными сечениями.
Перемещение стола именуется строчечной подачей.
При рассмотренной схеме перемещений обработка осуществляется вертикальными строками. Вероятна обработка горизонтальными строками.
В этом случае функциональная сообщение существует между перемещениями стола, приобретающим перемещение от регулируемого привода, информирующего вращение винту, и перемещениями шпиндельной бабки. Строчечная подача сообщается салазкам.
Сигналы управления поступают к приводу по связи.
При применении вычислительных устройств сигналы управления, вырабатываемые вычислительным устройством на базе программы, поступают к управляемым приводам.